It appears that your cart is currently empty




Description:
This ROSeducational robot car migrates complex computing tasks to PC virtual machine environment, no need embedded development board (Jetson NANO/Raspberry Pi) as the main controller. The data and information generated by the car are remotely transmitted to the PC virtual machine system by the ESP32 co-processor through the WIFI UDP function of MicroROS, and complete the calculation and generate decisions. Yahboom provide 4PCS 310 encoder motor, 7.4V large-capacity battery, professional MicroROS control board, TOF lidar and other accessories, combined with the ROS2-Humble operating system and Python3 programming to help it achieve obstacle avoidance, following, and mapping navigation, RVIZ simulation, multi-machine synchronization control and other functions.
Features:
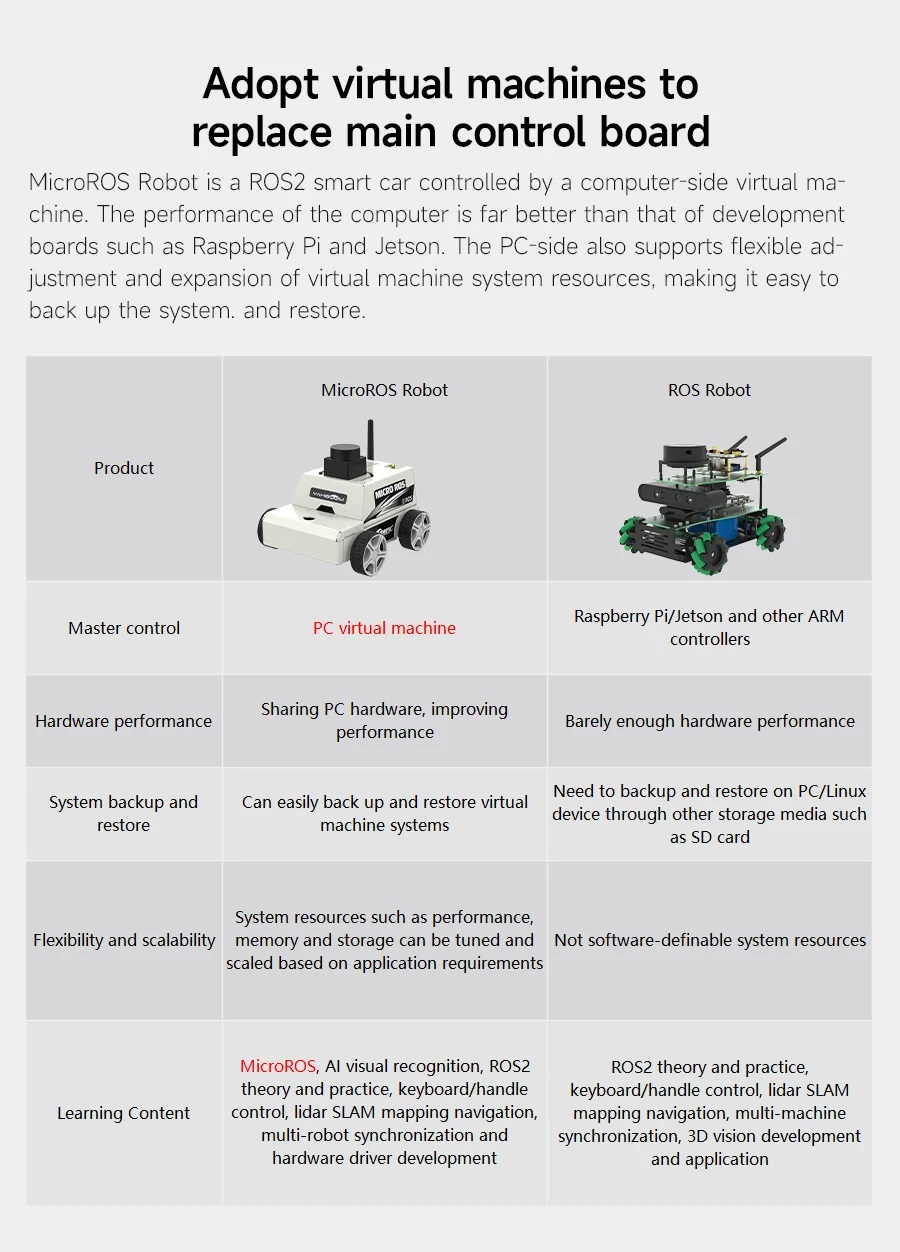
1. It breaks away from the traditional Jetson NANO/Raspberry Pi development board and uses a virtual machine as the controller to reduce costs.
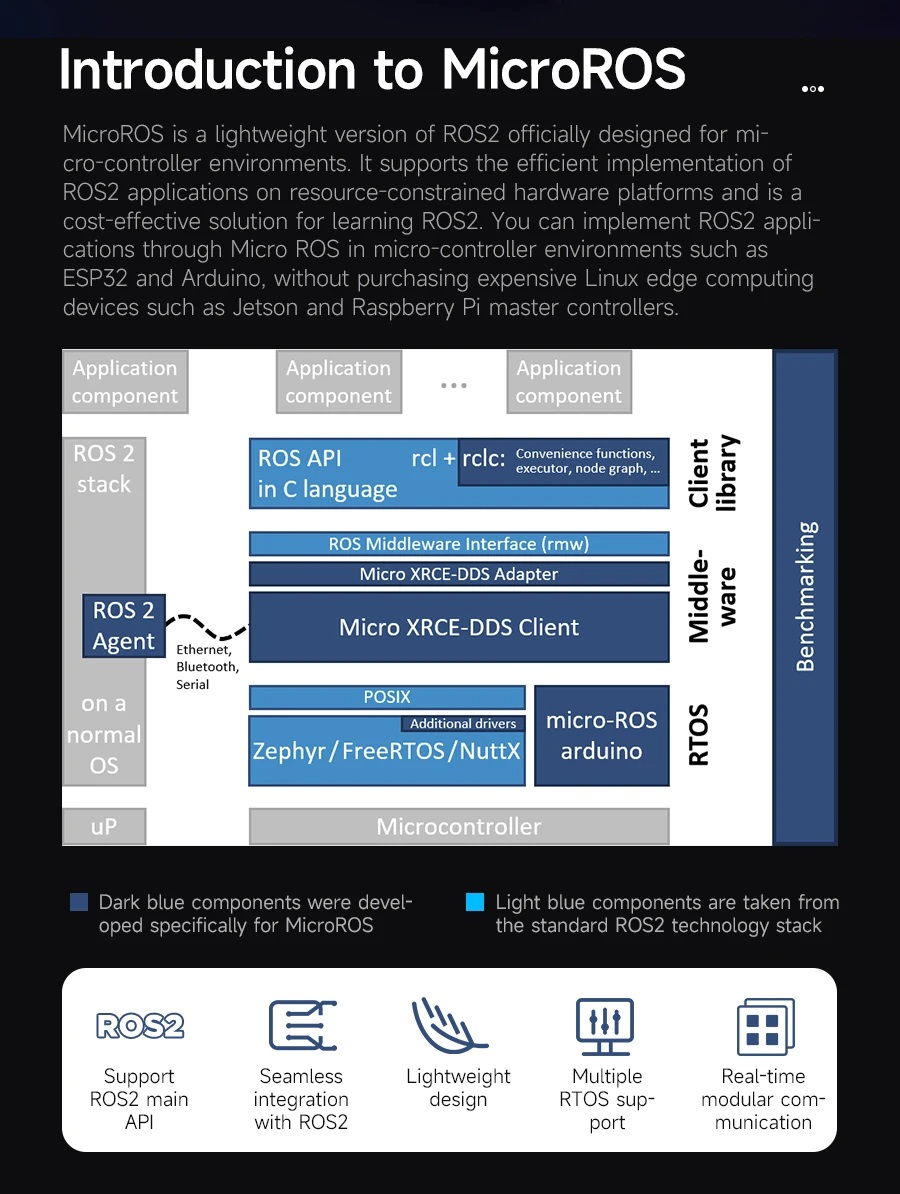
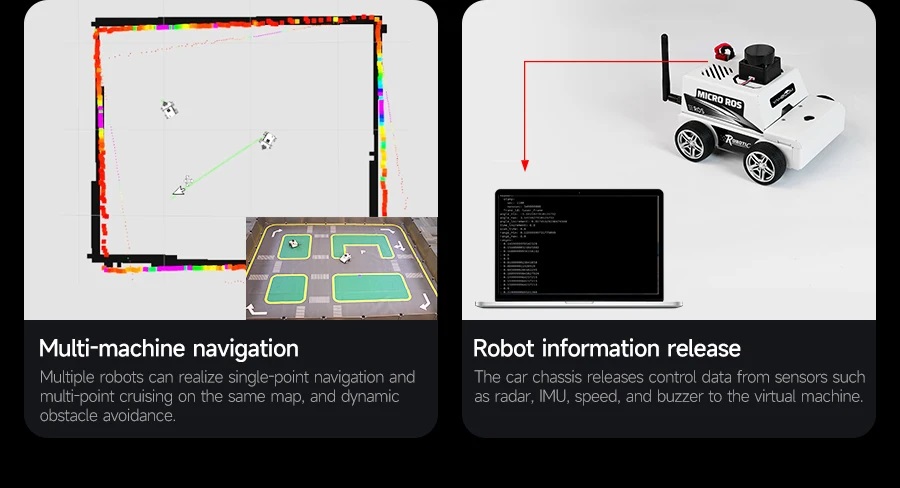
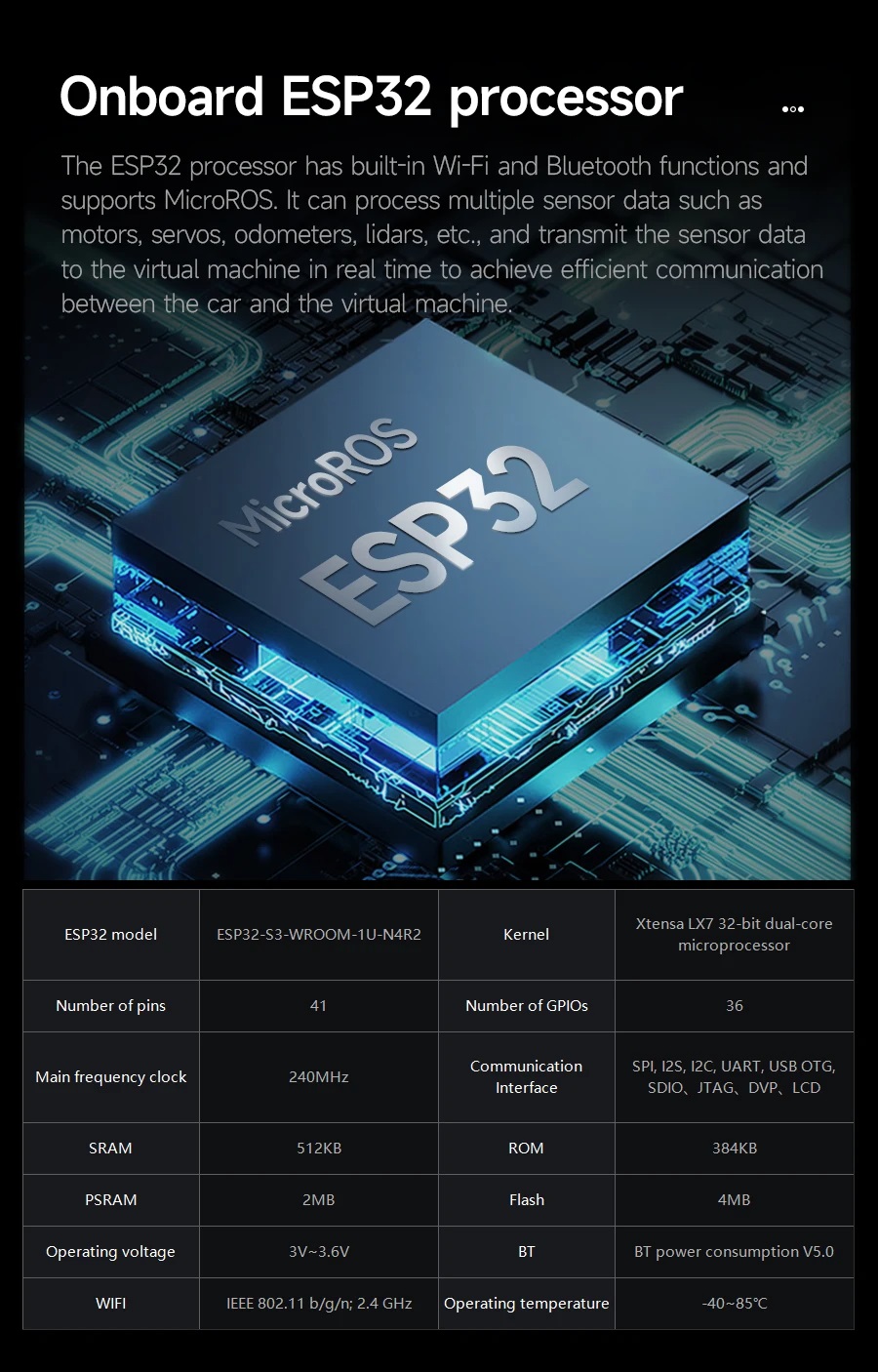
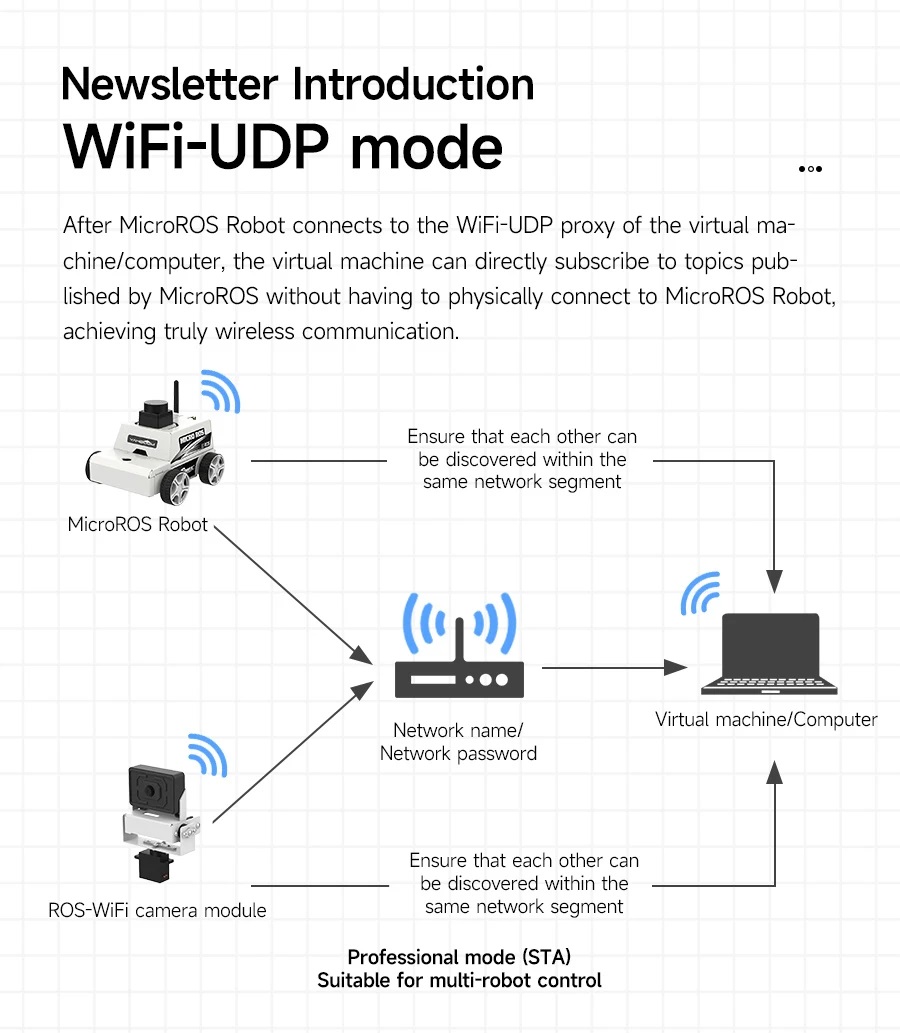
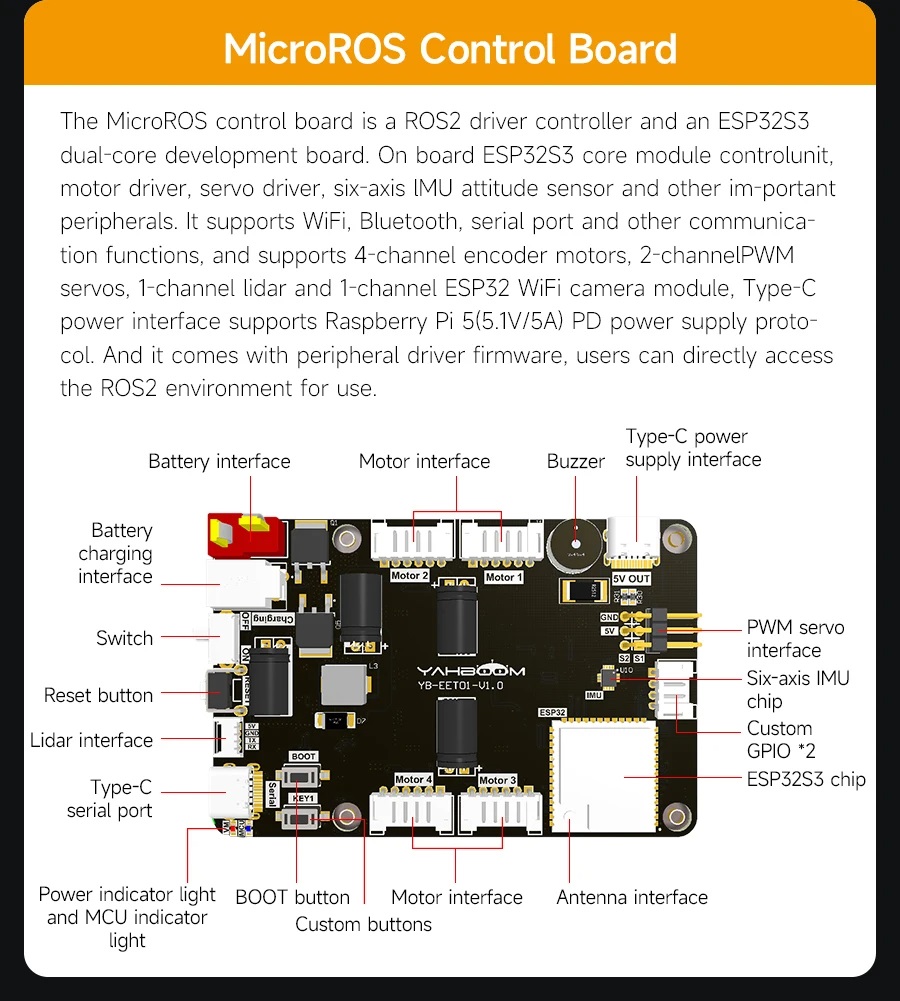
2. The MicroROS control board has a built-in ESP32, which uses the WIFI UDP function of MicroROS to realize remote communication between the car and the PC virtual machine.
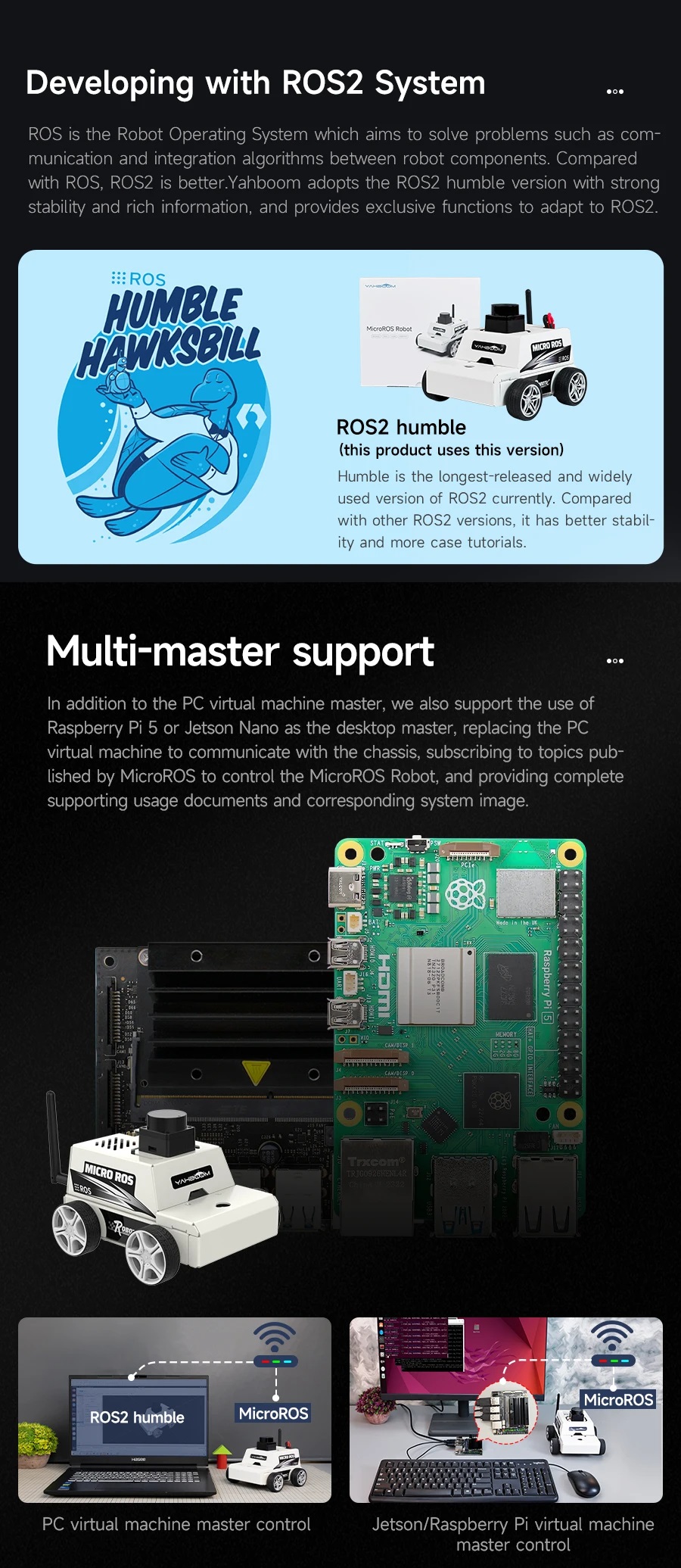
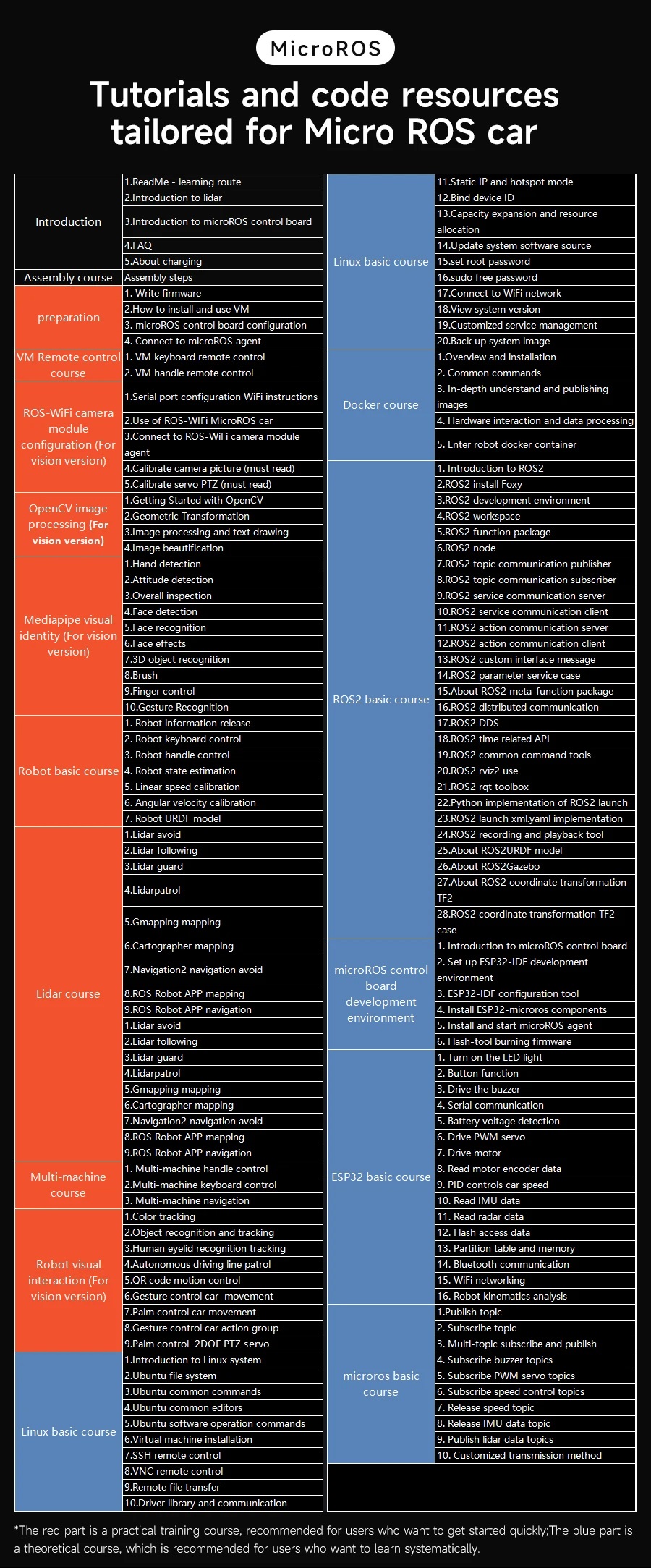
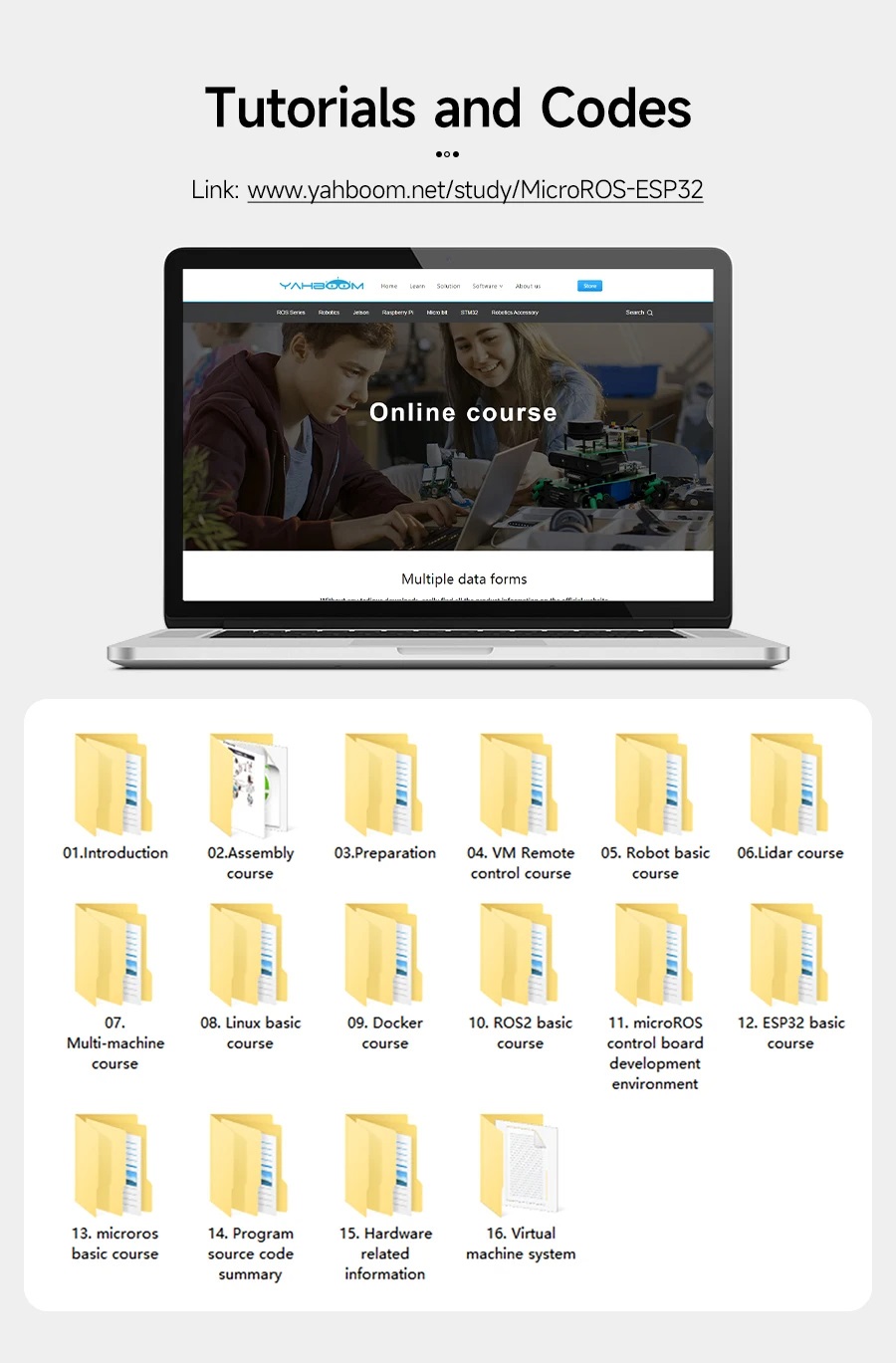
3. Adopt ROS2-Humble operating system and Python3 programming, and provides a large number of courses and source codes for user reference.
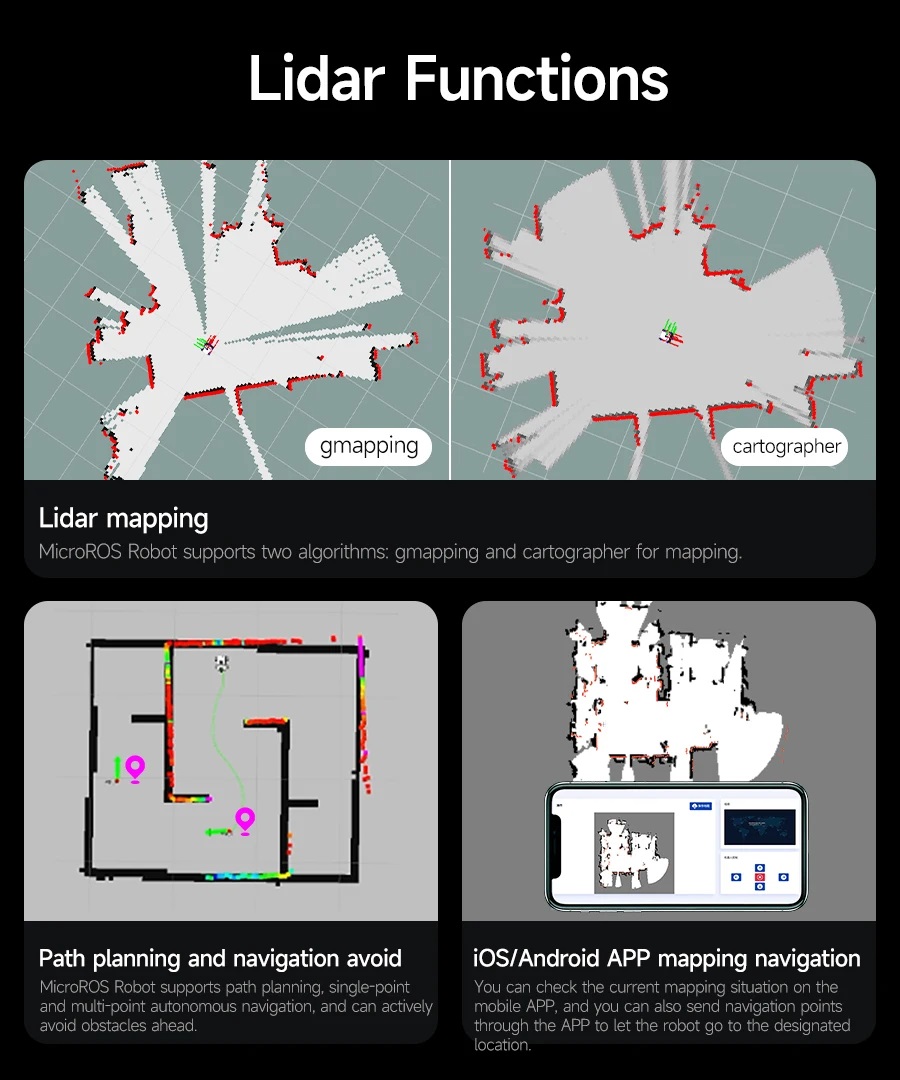
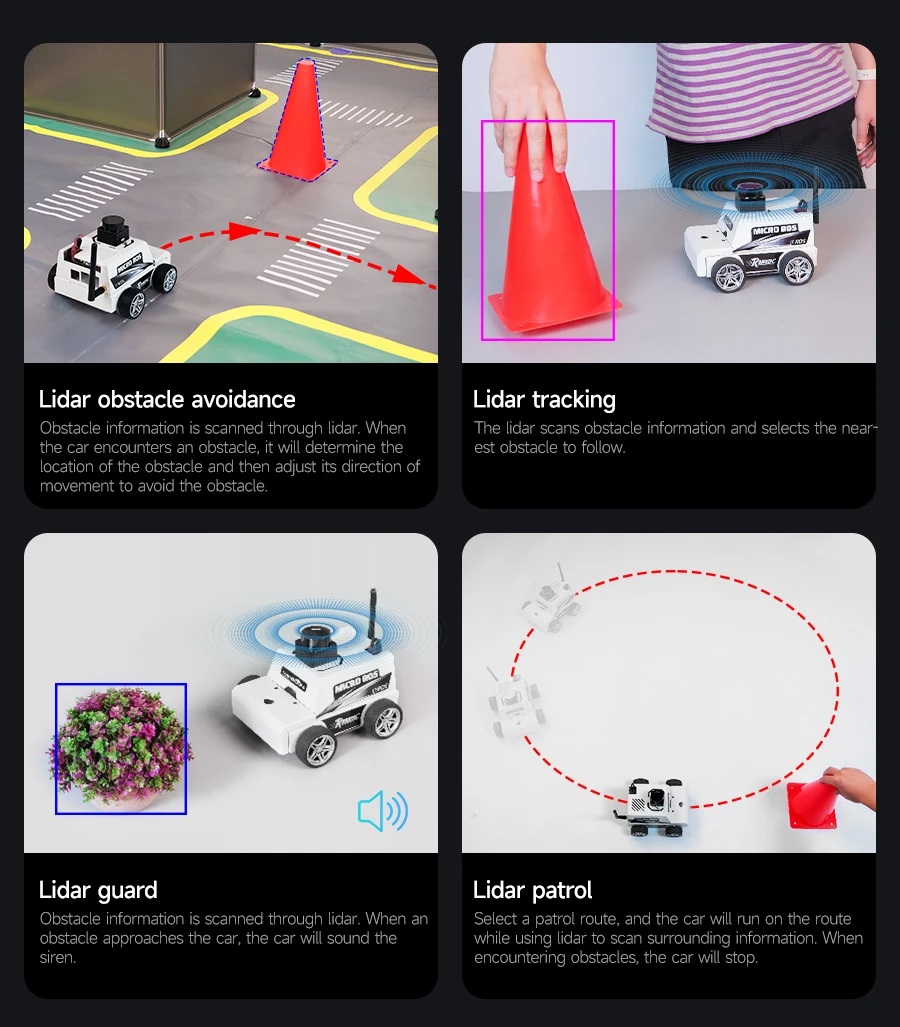
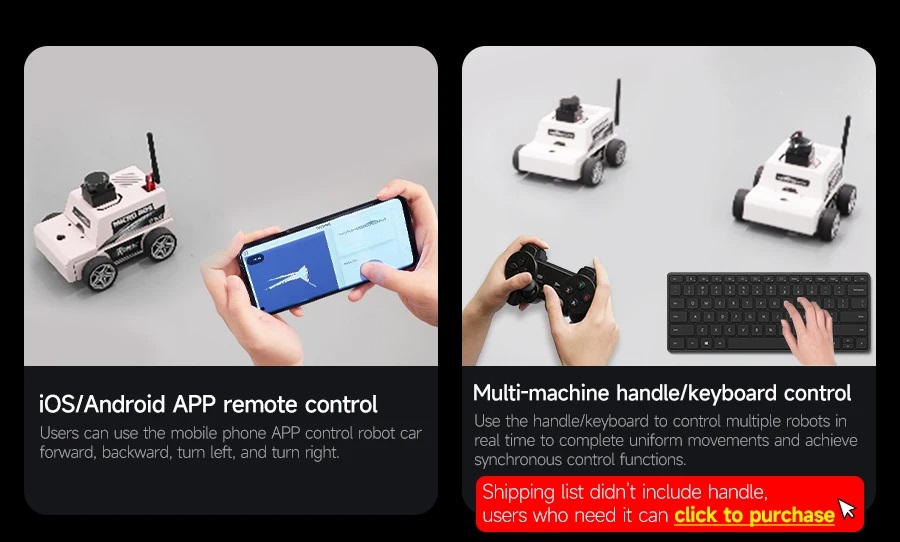
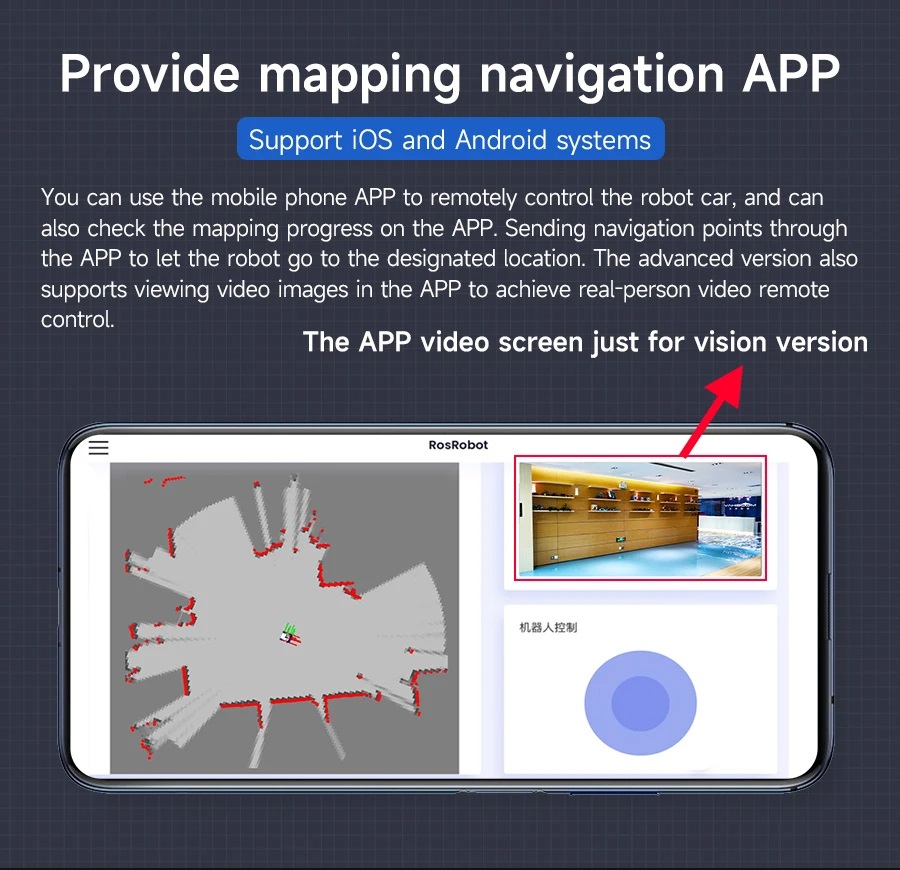
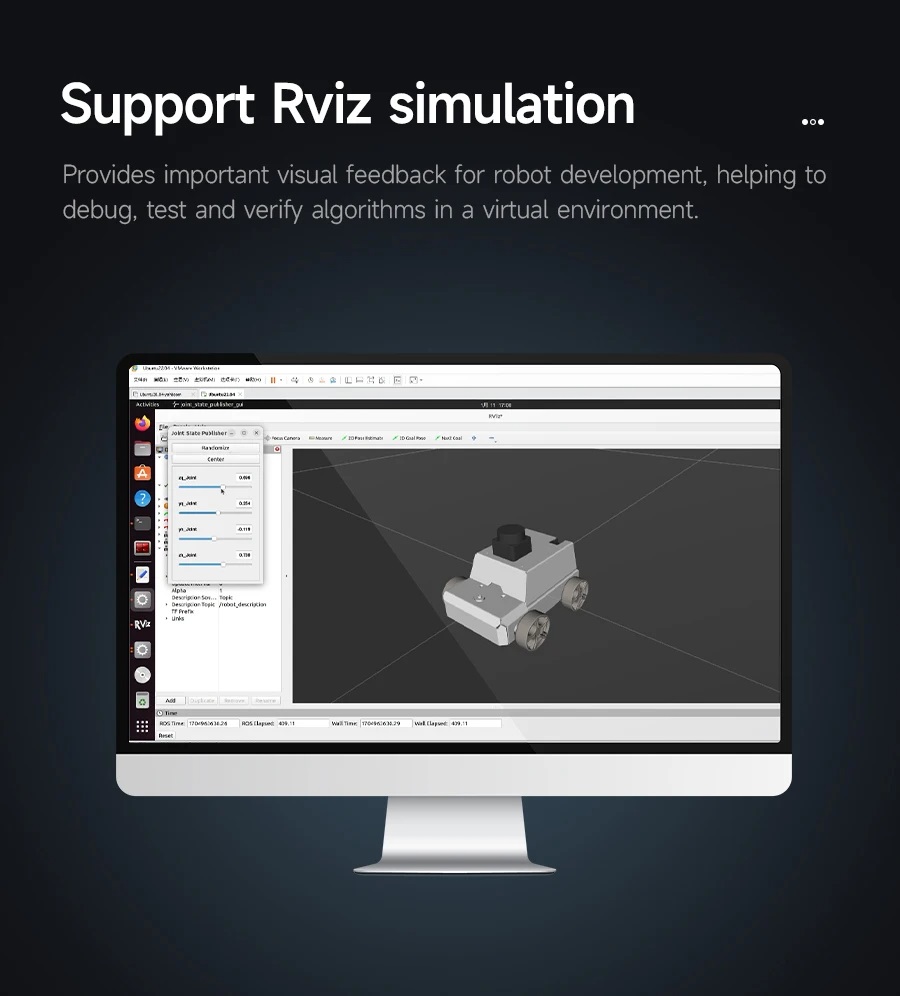
4. Lidar obstacle avoidance, following, mappingnavigation, RVIZ simulation, multi-machine synchronization control, APP/handle remote control and other functions are all supported.
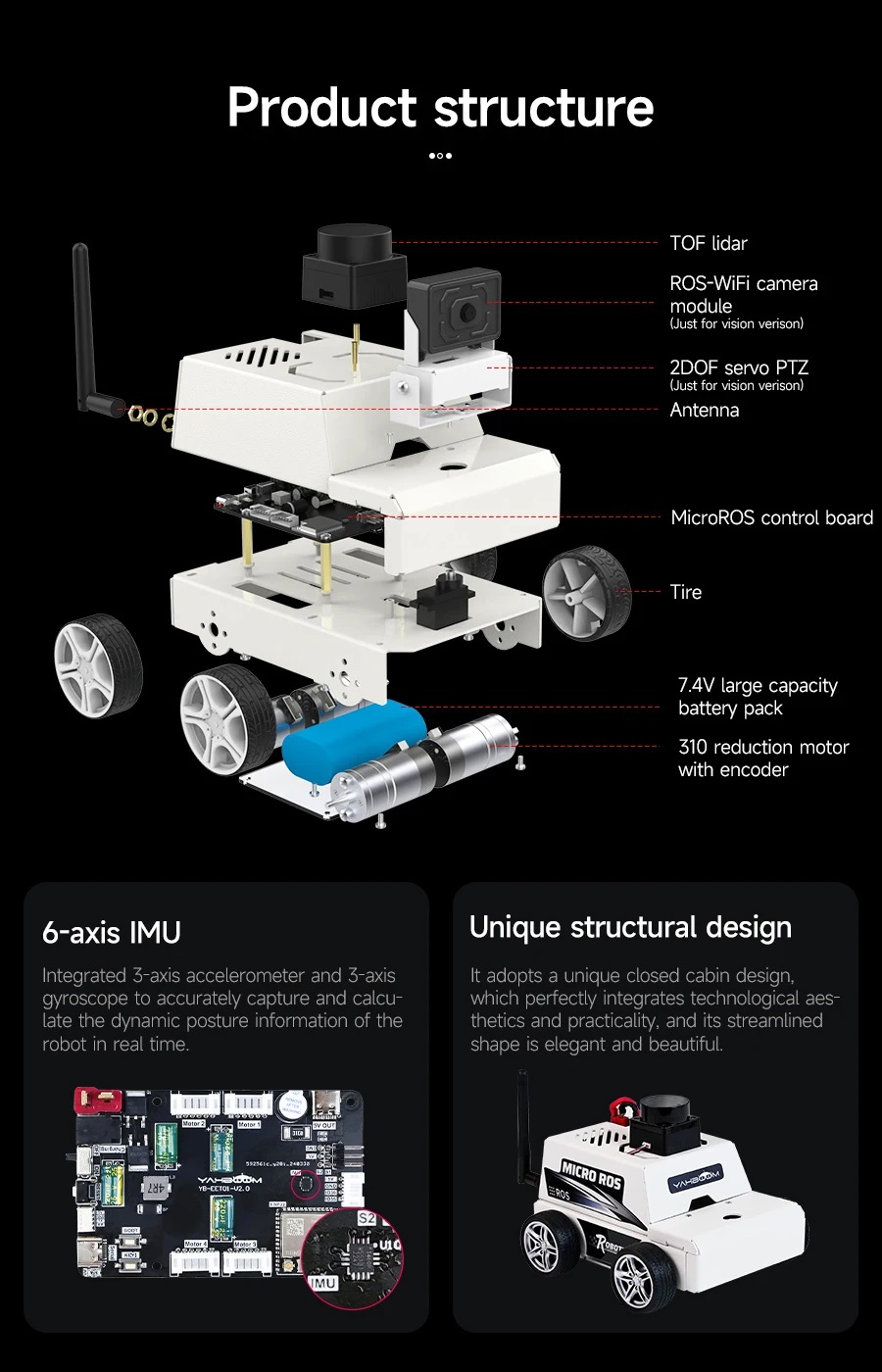
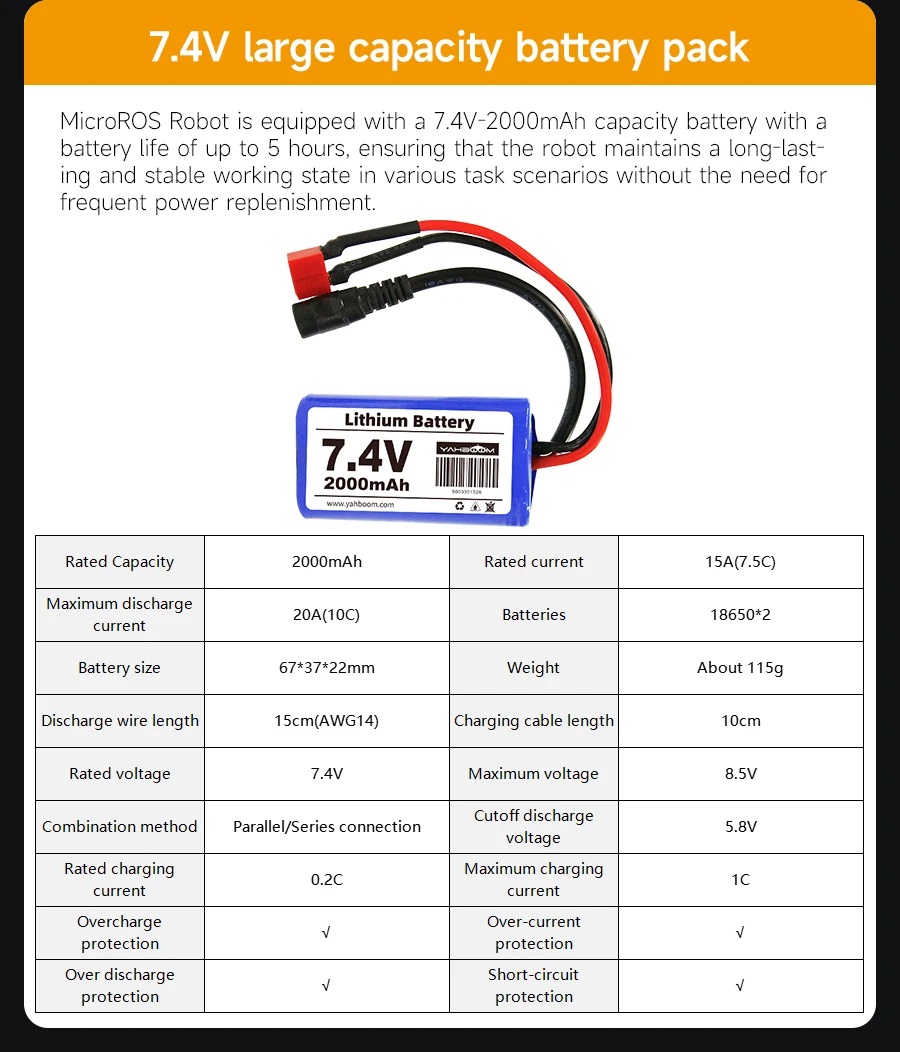
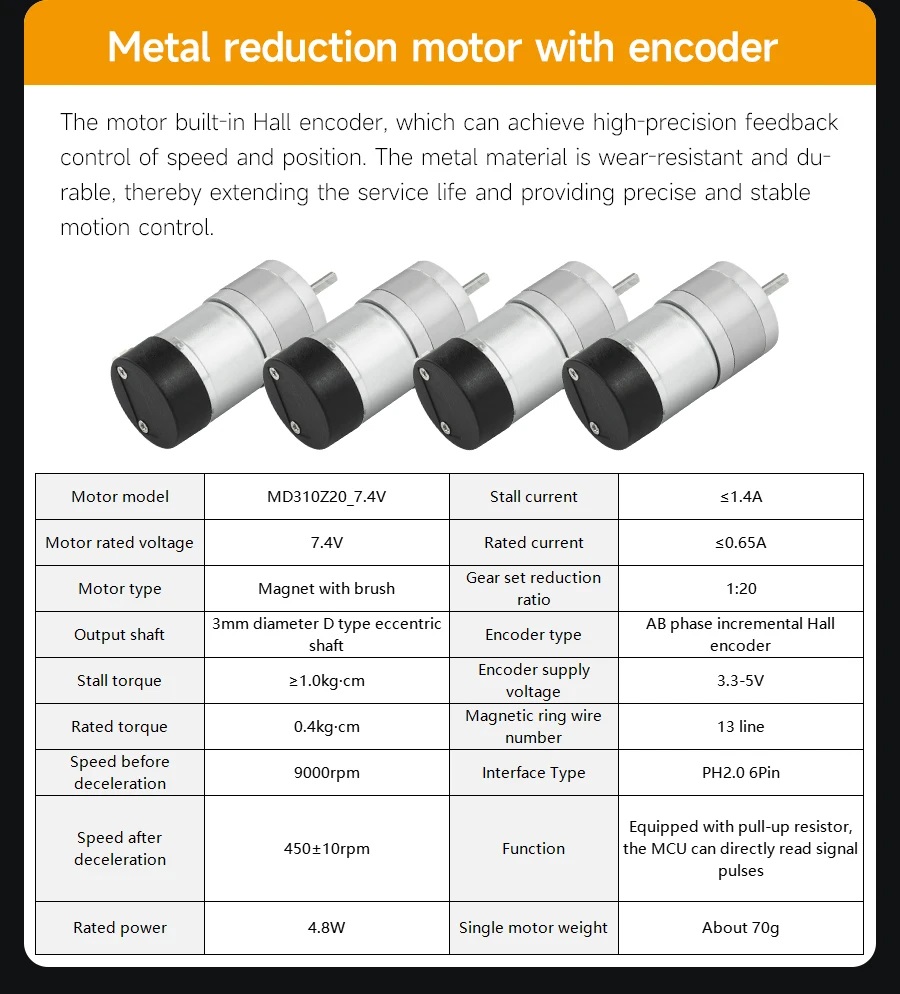
5. The body is made of aluminum alloy, equipped with a 310encoder motor and a 7.4V large-capacity battery, with beautiful appearance and excellent quality.
Specifications:
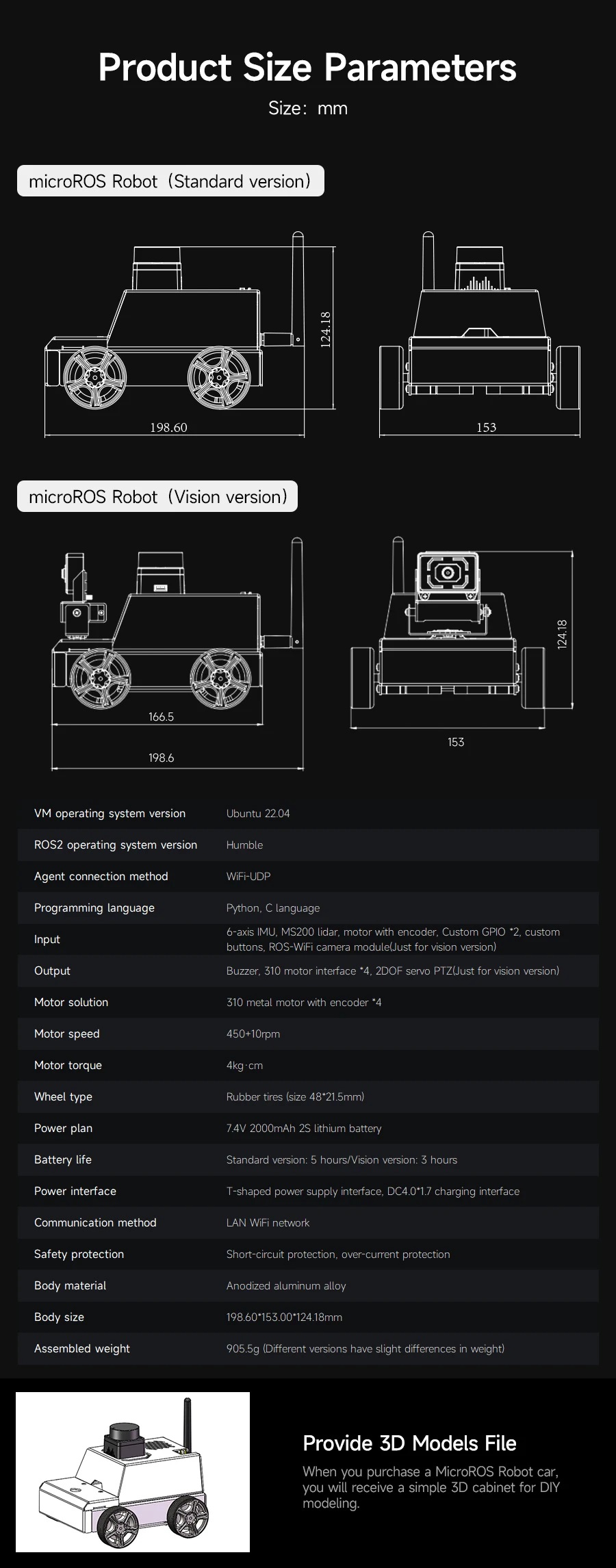
VM operating system version: Ubuntu 22.04
ROS2 operating system version: Humble
Agent connection method: WiFi-UDP
Programming language: Python, C language
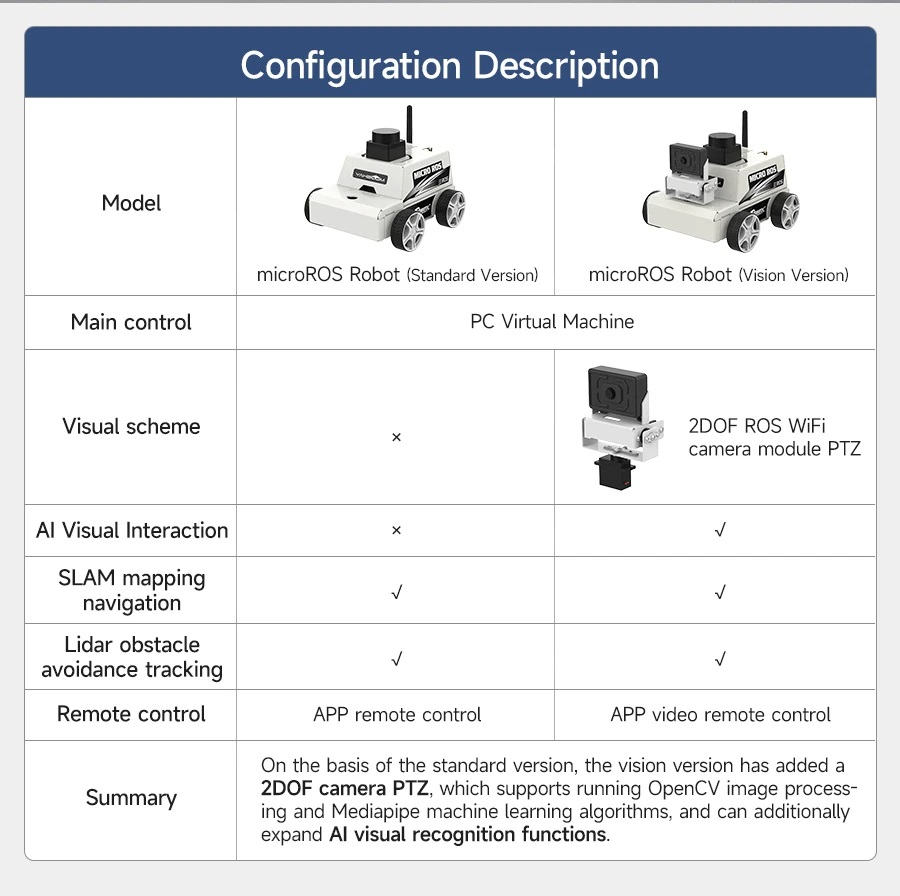
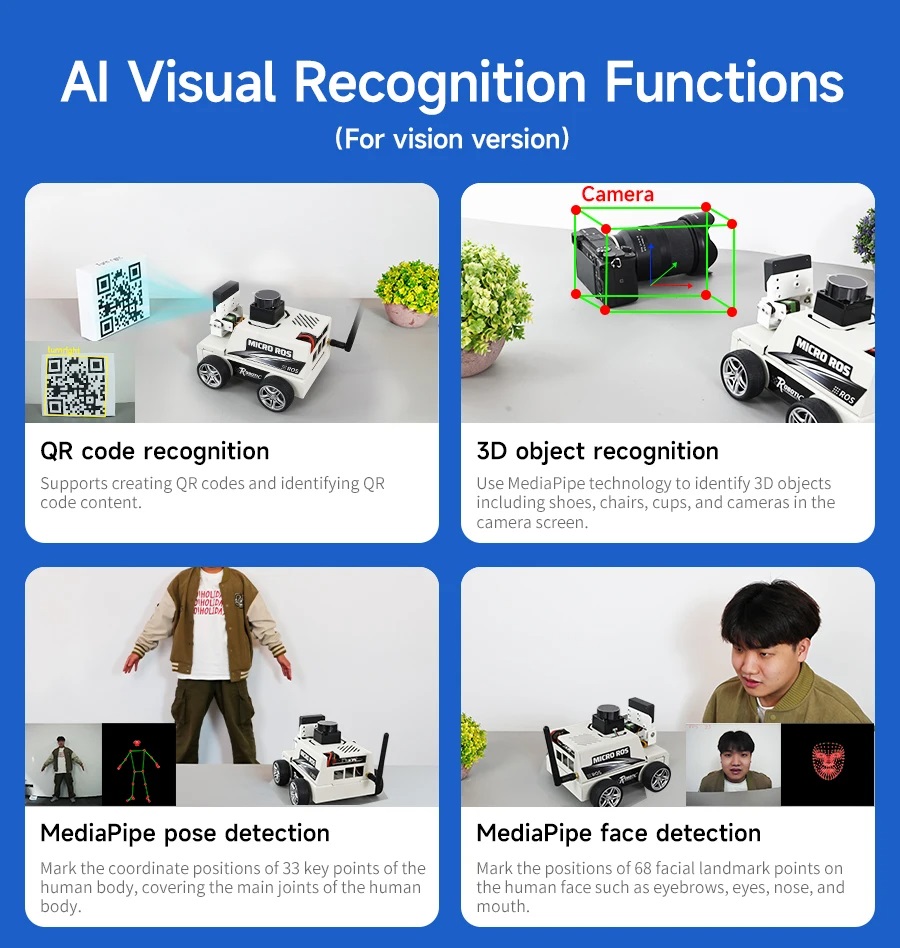
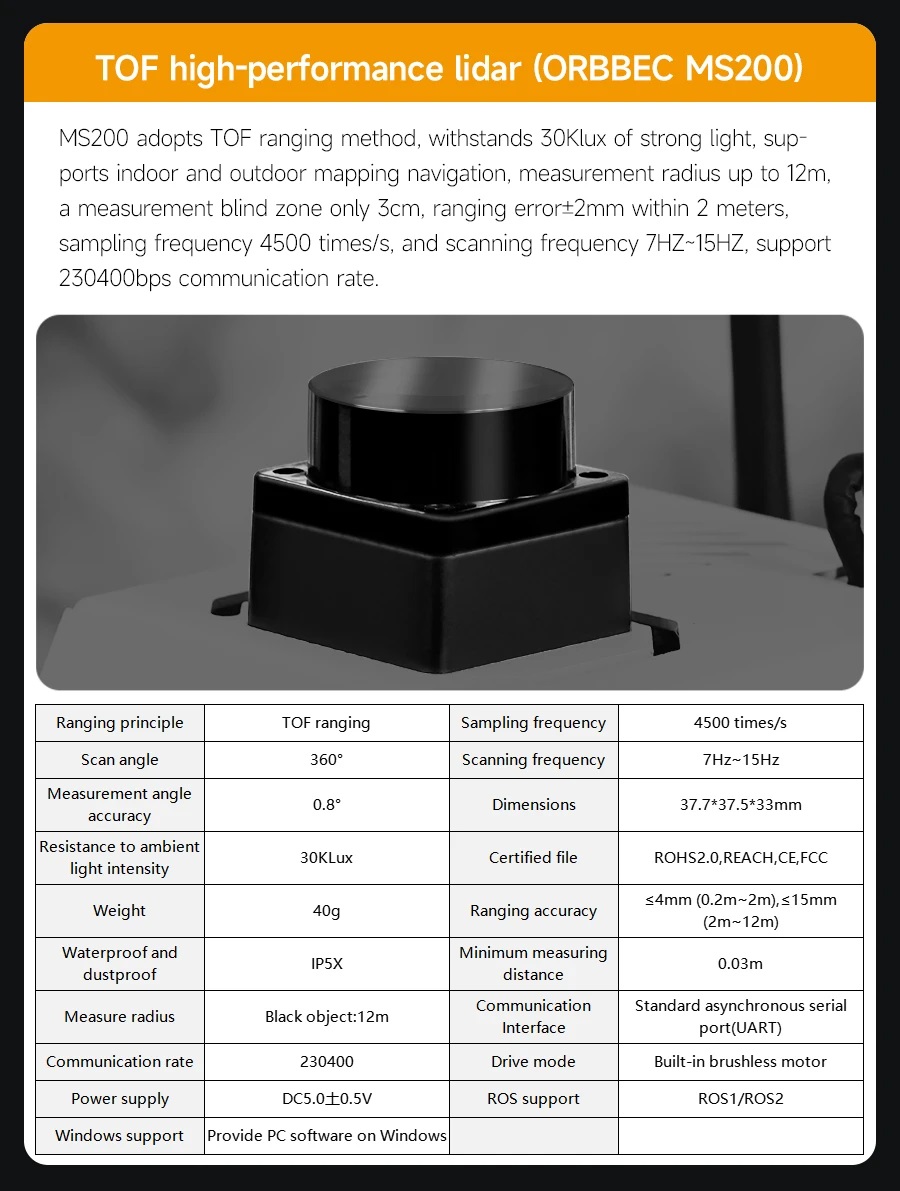
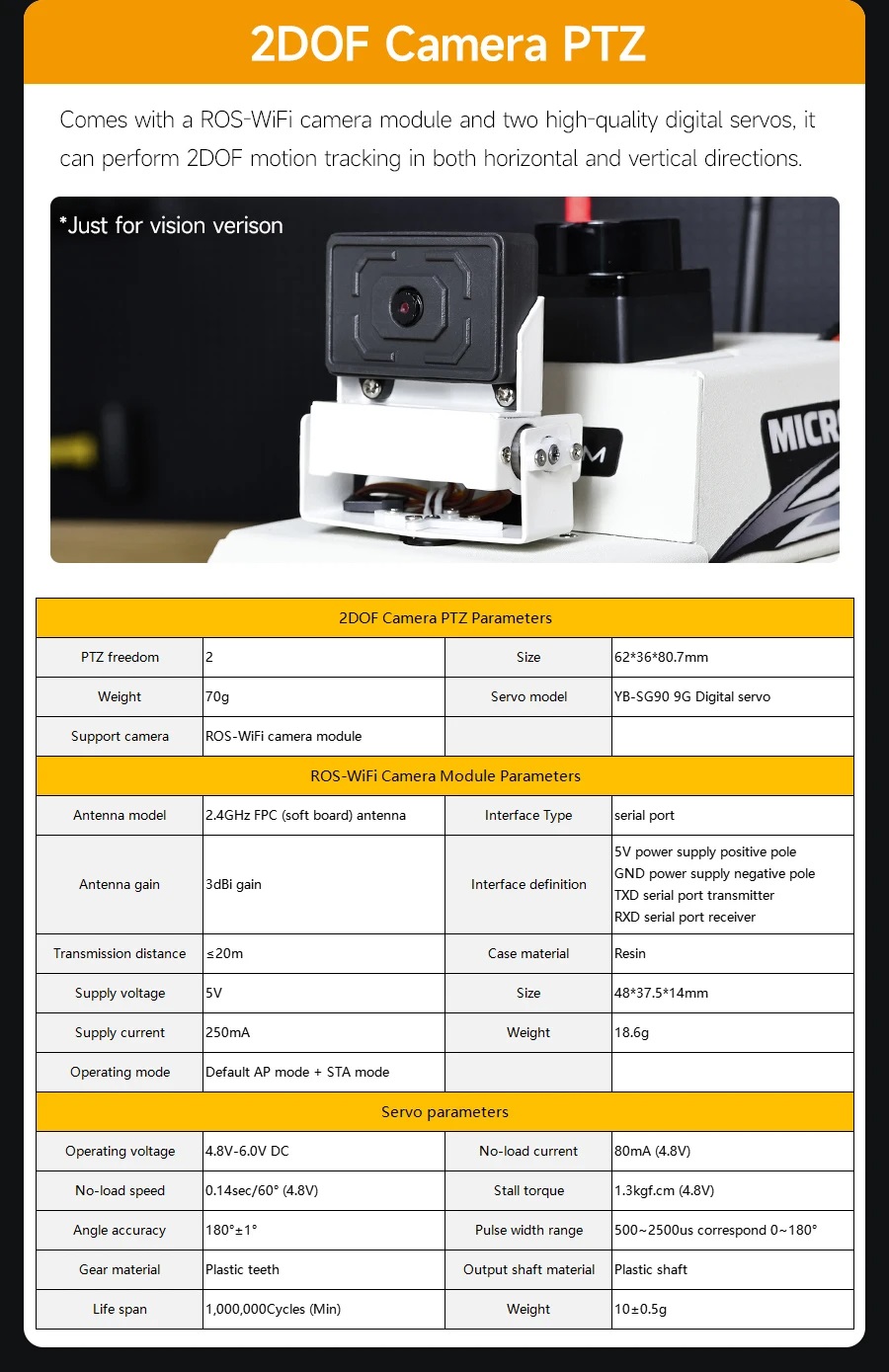
Input: 6-axis IMU, MS200 lidar, motor with encoder, Custom GPIO *2, custom buttons, ROSWiFi camera module(Just for vision version)
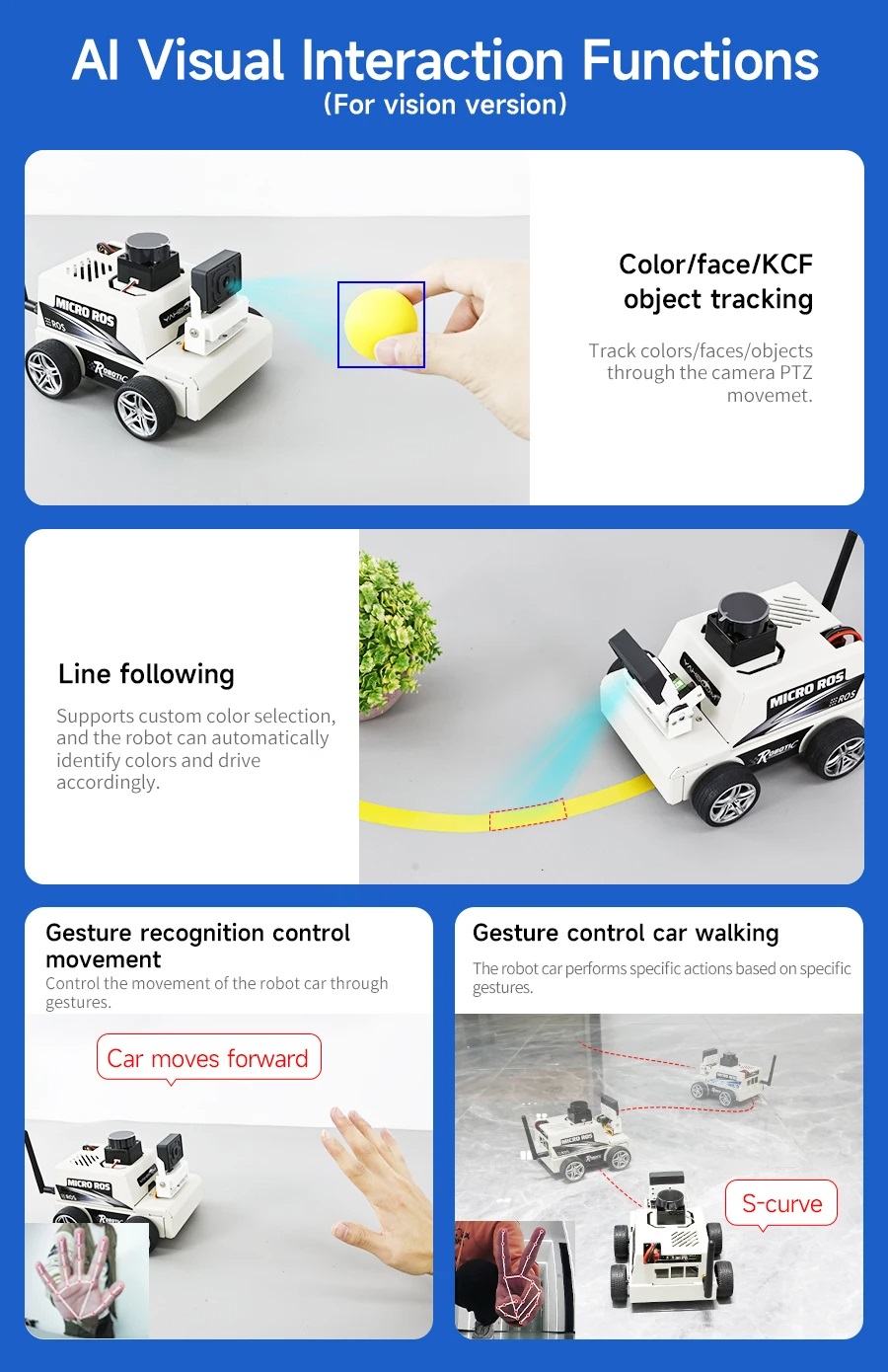
Output: Buzzer, 310 motor interface *4, 2DOF servo PTZ(Just for vision version)
Motor solution: 310 metal motor with encoder *4
Motor speed: 450+10rpm
Motor torque: 4kg·cm
Wheel type: Rubber tires (size 48*21 .5mm)
Power plan: 7.4V 2000mAh 2S lithium battery
Battery life: Standard version: 5 hours/Vision version: 3 hours
Power interface: T-shaped power supply interface, DC4 0*1.7 charging interface
Communication method: LAN WiFi network
Safety protection: Short-circuit protection, over-current protection
Body material : Anodized aluminum alloy
Body size: 198.60*153.00*124.18mm
Assembled weight: 905.5g (Different versions have slight differences in weight)
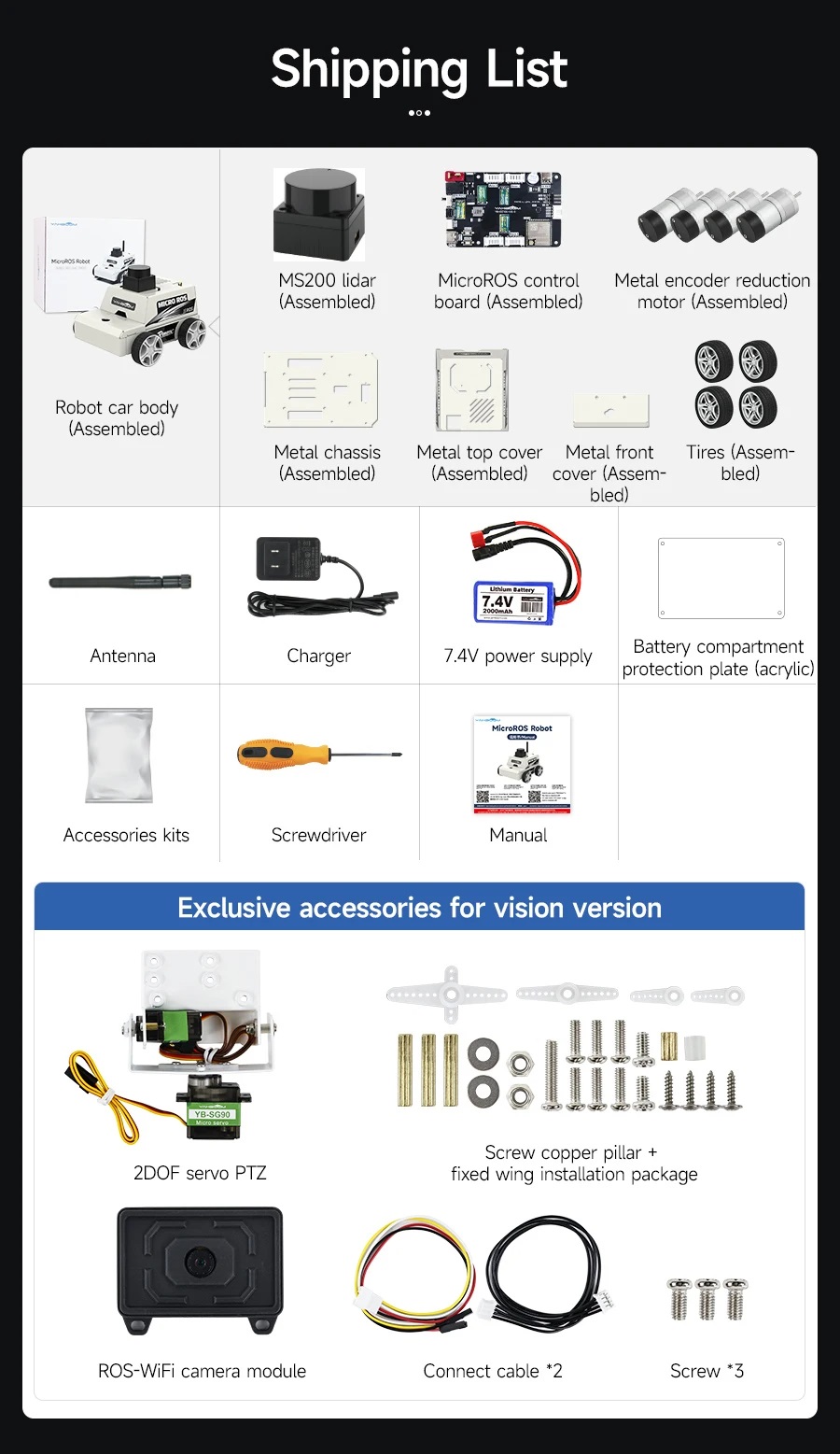
Package Include:
1x Robot Car Body
1x MS200 Lidar(Assembled)
1x MicroROS Control Board(Assembled)
4x Metal Encoder Reduction Motor(Assembled)
1x Metal Chassis(Assembled)
1x Metal Top Cover(Assembled)
1x Metal Front Cover(Assembled)
4x Tires(Assembled)
1x Antenna
1x Charger
1x 7.4V Power Supply
1x Battery Compartment Protection Plate(acrylic)
1x Accessories Kits
1x Screwdriver
1x Manual
Except for the above, Vision Version Exclusive Accessories:
1x 2DOF Servo PTZ
1x Screw Copper Pillar+Fixed Wing Installation Pack
1x ROS-WiFI Camera Module
1x Connect Cables
3x Screws